
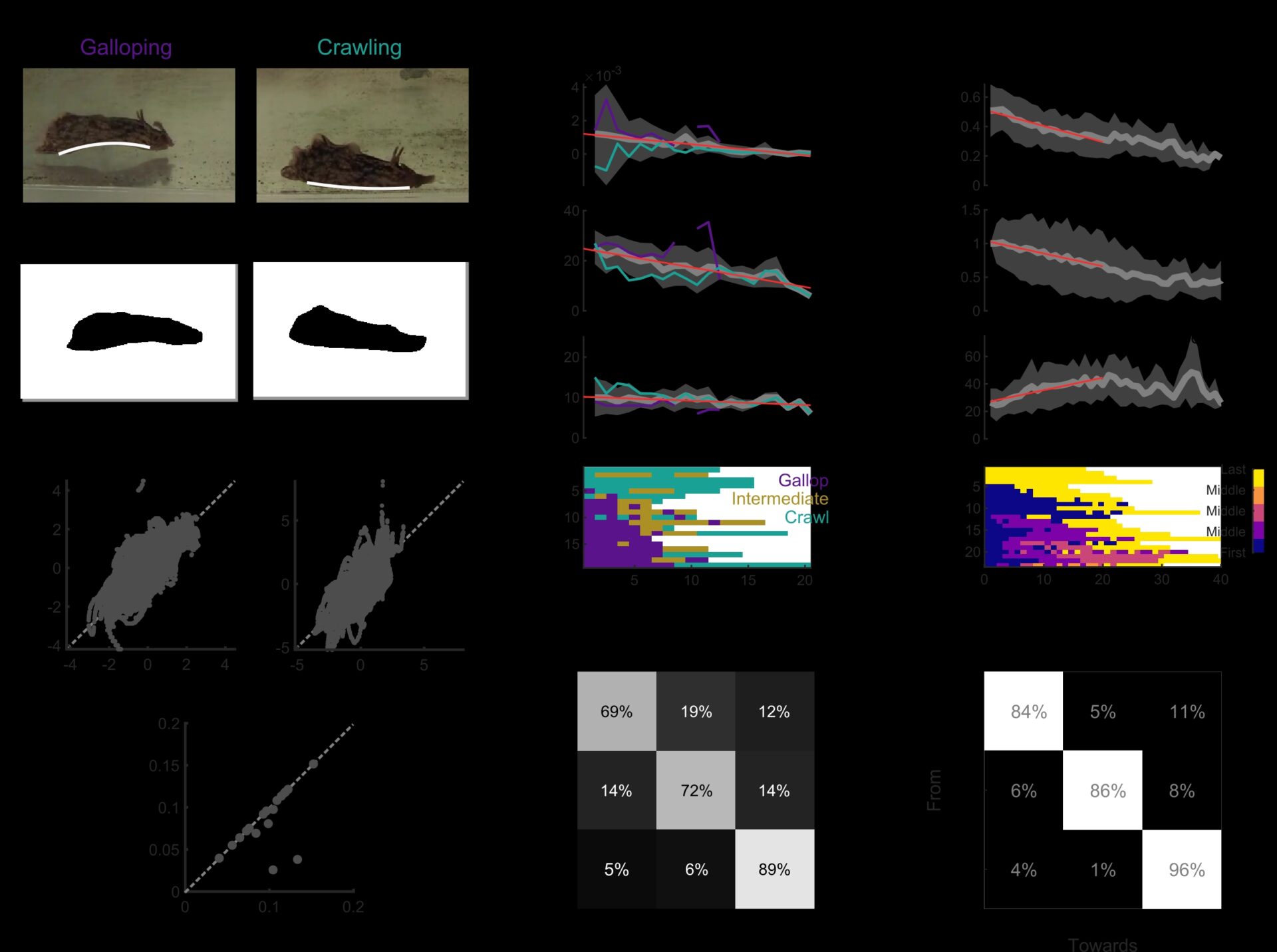
One of the key goals of neuroscience is to uncover the neural mechanisms that generate behaviour. Although much progress has been made in the development of tools that describe animal behaviour and the neural circuits that generate them in the last decade, how neural dynamics can give rise to multiple behaviours and the transitions among them remains unclear. Here we address this question for a ubiquitous behaviour such as locomotion in the sea slug Aplysia californica. We examine the neural dynamics underlying the transition between classically-defined locomotion modes: galloping and crawling (Fig 1A). These two modes have been classically defined based on qualitative changes in the animal shape (arching of the foot vs no arching) [1-4]. Yet, to date, no quantification of the animal locomotion escape has characterised these two modes and their transitions. Here we developed a customised tracker to characterise Aplysia’s locomotor behaviours. Our unsupervised analysis of video-tracking data (N = 19) shows that both forms of rhythmic locomotion can be captured by a low-dimensional model (the eigenslug) (Fig 1B). The eigenslug reveals that locomotion is defined by three key parameters: the animal's length, the arching of its foot, and the period of each cycle of muscle contractions driving the movement (Fig 1C and 1D). These parameters are flexibly controlled to generate the specific mode of locomotion. Unlike in previous observations [4], we found that the escape response does not correspond exclusively to a gallop-to-crawl sequence, but transitions from crawl to gallop are also possible (Fig 1E). To understand the neural dynamics that give rise to these locomotion modes and the transitions between them, we imaged the population neural activity of the pedal ganglion using voltage-sensitive dyes during fictive escape locomotion for up to 20 minutes (N = 25 recordings). These recordings are an order of magnitude longer than previously reported experimental settings [5-6]. We found that population activity consistently forms a low-dimensional spiral whose parameters independently control each of the three locomotion parameters defined by the eigenslug: the spiral’s tilt of rotation controls the arching of the foot, its amplitude controls the animal’s length contraction, and its period controls the period of the animal’s locomotion cycle (Fig 1F). Furthermore, unsupervised clustering of the neural dynamics based on the tilt of the neural trajectories recovers the statistics of the transitions between locomotion modes (Fig 1E and 1G). In this way, the locomotion modes emerge from continuous reconfigurations of the population’s low-dimensional dynamics. These results suggest that flexible control of low-dimensional neural dynamics is a general principle for specifying and transitioning between multiple motor patterns.
Breakthroughs in Understanding Natural Behaviour and its Neural Underpinnings (University of Manchester, UK) (2024) Proc Physiol Soc 61, C04
Oral Communications: Multiple locomotion modes emerge from reconfigurations of neural population dynamics in Aplysia
Andrea Colins Rodriguez1, Evan Hill1, William Frost1, Mark Humphries1,
1Facultad de Medicina, Universidad de Chile Santiago Chile, 2School of Psychology, University of Nottingham Nottingham United Kingdom, 3Stanson Toshok Center for Brain Function and Repair, Rosalind Franklin University of Medicine and Science Chicago United States,
View other abstracts by:
Where applicable, experiments conform with Society ethical requirements.