Introduction
Hierarchical modularity is a ubiquitous characteristic of complex systems (e.g. human motor system), describing how constituent parts interact in a goal-directed manner, forming functional modules. The ‘muscle synergy’ concept is employed by the motor control research field to investigate the modular structure of neural circuitry coordinating movement [1]. Recent influential works however highlight limitations among current analytical approaches [2–4]. In particular, recent theoretical innovations suggest that muscles not only work together towards functionally similar task-goals, but also functionally complementary and independent task objectives [5]. Moreover, functional modularity is proposed to not only operate between muscles but also within muscles, enabling the concomitant compliance of muscles towards various task constraints. However, current approaches cannot facilitate the quantification of these muscle interactions across scales. Thus, the aim of our study was to probe the functional architecture of the human motor system in a novel way by developing a principled methodology that aligns with the best current knowledge on human movement modularity.
Methodology
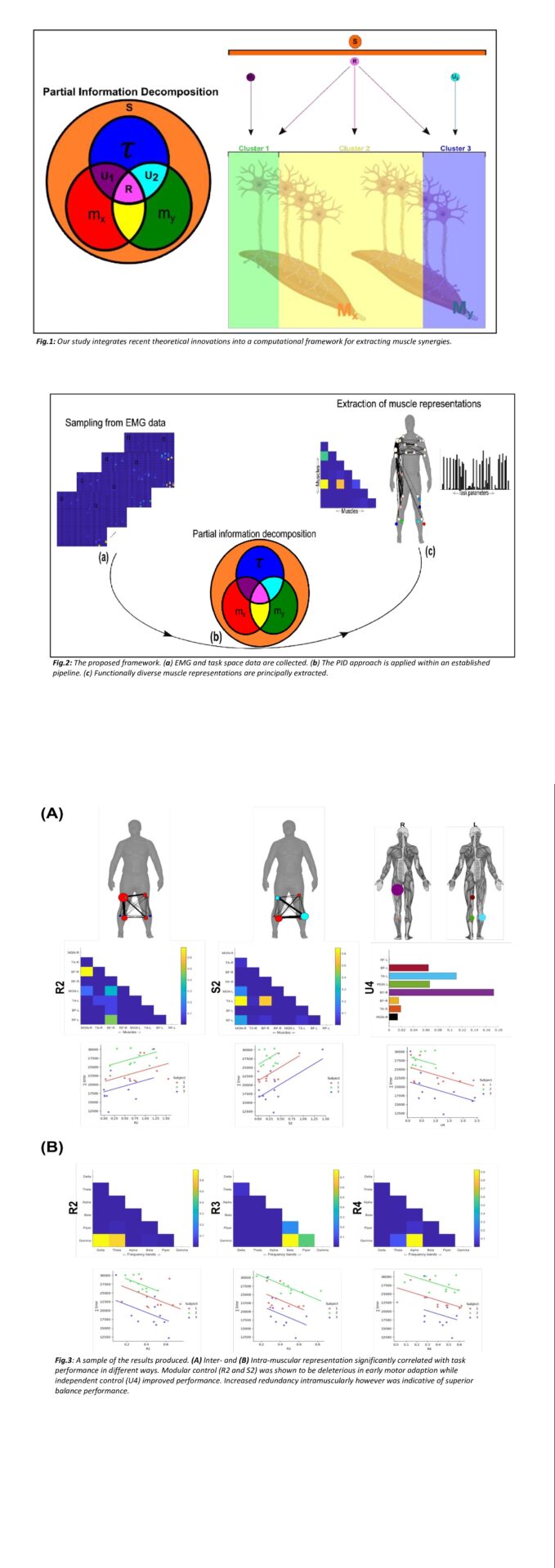
Here we extended traditional approaches and built on our previous developments in directly characterising the functional roles of muscle interactions with respect to task performance. Specifically, we implemented the Partial information decomposition (PID) framework to quantify functionally diverse (i.e. functionally similar, complementary, and independent) inter- and intra-muscular interactions [6]. By incorporating the PID approach into an established pipeline [7,8] (Fig.2), these interactions can be simultaneously quantified as redundant (R) (pink intersection), synergistic (S) (orange shading) and unique (U) (magenta and cyan intersections) information respectively (Fig.1). In doing so, we pose the degrees-of-freedom problem of motor control as the problem of information sharing across complex muscle networks.
Results
Through the application of this framework to three benchmark datasets, we firstly demonstrated how the decomposition of task-relevant muscle combinations reveals a complex functional architecture underlying everyday human movements. This functional architecture displayed a nested network structure of functionally similar and complementary muscle couplings along with unique contributions by individual muscles to task performance. We found that the extracted representations were consistently generalizable beyond any data subset and across disparate motor tasks (i.e. whole-body reaching and balancing tasks). We then further investigated the contribution of individual muscles to task performance by applying the proposed framework to pairs of frequency-specific intramuscular rhythms, revealing that functional modularity is a scale-invariant characteristic fundamental to movement construction. Finally, we showed that these inter- and intra-muscular representations were differentially predictive of salient motor features including motor adaptation and age group, suggesting they offer complementary windows into movement control.
Conclusions
We have developed and successfully applied a novel computational framework for the extraction of functionally diverse muscular interactions across multiple scales. We were able to comprehensively characterize the functional underpinnings of several distinct motor tasks while ensuring physiological relevance and generalizability. Our method further widens the scope of the muscle synergy concept, showing how muscles can work together redundantly, synergistically, and independently towards task performance. We thus align current analytical approaches with the forefront of theoretical understanding in the field and open up novel opportunities for future research through novel perspectives on modular movement control.