Grasping and lifting objects necessitate anticipatory planning of fingertip forces. However, when objects have a complex geometry, for example an asymmetric centre of mass, fingertip forces are further scaled based on the fingertip positioning relative to the object centre of mass, a process only taking place after object contact. Thus, skilled grasp control arises from a sophisticated interplay between anticipatory and feedback control mechanisms. The relative weighting between anticipatory and feedback mechanisms depends on the degree to which one can predict fingertip positioning before object contact, for example through prior experience with the object. In the present experiment, we varied the predictability of fingertip positioning, hypothesising that this would modify the reliance on anticipatory vs. feedback mechanisms in high vs. low predicable fingertip positioning conditions, respectively.
We then probed the effect of a shift from anticipatory to feedback control mechanisms on corticospinal excitability (CSE) using a directional transcranial magnetic stimulation (TMS) protocol, by applying postero-anterior (PA) or antero-posterior (AP) induced currents.
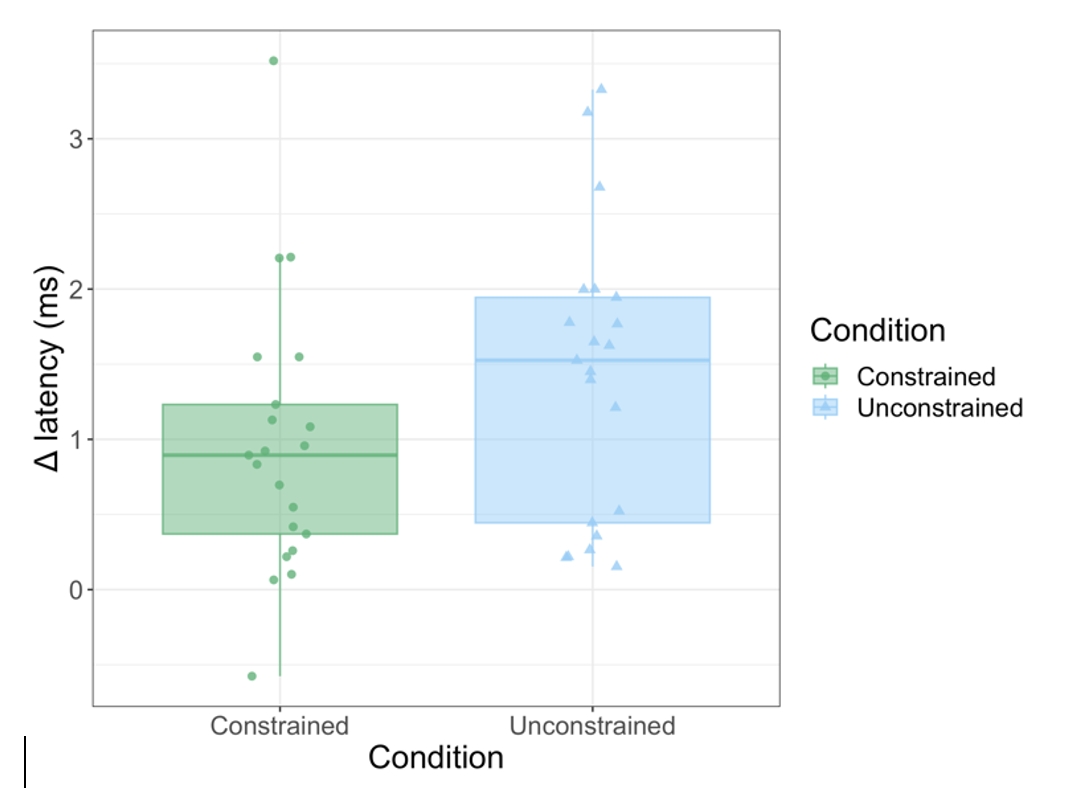
We asked participants (n=21) to grasp and lift an object with an asymmetrical centre of mass while minimizing tilting. Fingertip positioning could be either visually cued (i.e., constrained) or freely chosen (i.e., unconstrained), thus altering the reliance on anticipatory vs. feedback control mechanisms, respectively (as in Davare et al. 2019). Single pulse TMS was delivered just after object contact in a PA or AP configuration. While PA TMS led to short latency motor evoked potentials (MEPs), AP TMS delayed MEP onset by 1.2 ms on average, likely as AP currents preferentially activate late I-wave inputs to corticospinal neurons. We found that the increased weighting of sensorimotor feedback processing in the unconstrained vs. constrained condition had no differential effects on the MEP amplitude in either PA or AP TMS conditions. Interestingly, we found changes in MEP latencies depending on the grasp context: the differential MEP latency between AP and PA TMS conditions was larger in the unconstrained (t20=2.75; p=0.012) compared to the constrained grasp.
These findings suggest that an increased reliance on feedback control mechanisms is driven by late I-wave pathways, likely mediating cortico-cortical inputs to the primary motor cortex. We ultimately suggest that MEP latency, as assessed by directional TMS protocols, can be a neurophysiological biomarker for probing the integrity of sensorimotor processing during skilled hand movements.