Physiology News Magazine

From gunnery to homeostasis: is physiological constancy controlled intermittently?
Negative feedback mechanisms are fundamental for the regulation of movement, as well as systemic and cellular variables. Recent research shows that serial ballistic action provides a new physiological paradigm for interpreting sustained control.
Features
From gunnery to homeostasis: is physiological constancy controlled intermittently?
Negative feedback mechanisms are fundamental for the regulation of movement, as well as systemic and cellular variables. Recent research shows that serial ballistic action provides a new physiological paradigm for interpreting sustained control.
Features
Ian Loram(1), Henrik Gollee(2), Martin Lakie(3),Peter Gawthrop(2)
1: Institute for Biomedical Research into Human Movement and Health, Manchester Metropolitan University, Manchester, UK
2: Department of Mechanical Engineering, Centre for Systems and Control, University of Glasgow, Glasgow, UK
3: Applied Physiology Research Group, School of Sport and Exercise, Sciences, University of Birmingham, Birmingham, UK
https://doi.org/10.36866/pn.87.31
Homeostasis is the physiological control of variables such as body position, blood pressure and body temperature. It is founded on negative feedback mechanisms involving nerves and hormones to communicate signals. In the 80 years since the physiologist WB Cannon coined the word ‘homeostasis’, physiologists have drawn their conceptual models and theoretical analysis from engineering control theory. Homeostatic control at all levels from cells and molecules to integrative systems to the control of posture and movement, has been interpreted on the assumption that control is continuous, leading to the servo mechanism and its modern relative the continuous optimal controller using internal models (Fig. 1).

However, these engineering controllers were designed for machine systems in which usually measurement is usually precise, actuators and loads are consistent, time delays are short and computation is fast. The opposite is generally true in physiological systems that can be characterised by long neuro-motor and hormonal delays, essential variability, history dependence and fatigue.
Since 1945, there has been much interest in modelling the human operator as a control system. Largely this interest was motivated by the desire to interface humans to machines, in particular to provide the optimal interface between skilled pilots and fighter aircraft. In seminal studies of the archetypal tracking task, the aiming of guns at moving targets, Craik observed that the human operator can be described as a servo system. However, he noted that the human servo operated intermittently rather than continuously. He proposed serial, ballistic action which means that smooth control proceeds as a sequence of sub-actions each planned using current sensory information but then executed ‘open loop’ i.e. without being influenced by feedback of the result. Using ‘smoked drums’ to record results, he demonstrated the refractory nature of tracking following an initial response to an unpredicted, discrete step stimulus and proposed the ubiquitous nature of serial ballistic control in humans at a rate of two to three actions per second (Craik, 1947). In this scheme the feedback loop is ‘closed’ intermittently to correct errors of prediction.
With the advent of digital computers in the 1950s and 60s, machine control using discrete sampling of signals developed within engineering. There was initial excitement over whether human control could be explained in this fashion: indeed, sampling would provide a natural explanation of the low bandwidth of voluntary manual control at around 2 Hz. However, experiments proved inconclusive (Navas & Stark, 1968).
Discrete actions such as throwing, reaching and pointing are known to be initially pre-planned and ballistic because there is inadequate time for sensory information to inform execution of the task. This distinguishes them from sustained tasks such as postural control which are thought to employ continuous ‘closed loop’ feedback. Such sustained tasks involve peripheral feedback mechanisms that are known to respond continuously to joint rotation and other external stimuli up to high frequencies such as 10 Hz and beyond. Since the initial incontrovertible demonstration of central refractoriness (Craik, 1947), the postulated integration of continuous peripheral and intermittent ballistic mechanisms to perform sustained tasks such as steering vehicles, helming yachts and postural control has remained debated (Navas & Stark, 1968; Hanneton et al. 1997; Loram et al. 2011) and unresolved. Even if sustained control is serial ballistic, refinement as the task is learned would tend to smooth the joints between successive sub-movements, leaving the spectre of an un-testable hypothesis. Gawthrop et al. (2011) use the term ‘masquerading’ to describe the phenomenon of smooth serial ballistic control becoming indistinguishable from continuous control. It is easy and popular to describe physiological control using continuous models such as the servo mechanism and to label the unexplained portion as remnant or noise. The default assumption has become that control is continuously closed loop: it requires experimental evidence to disprove this and to establish the role of intermittent control.
In the absence of a methodology that will unambiguously distinguish continuous from serial ballistic control, we have attempted to break the impasse by taking a different approach and by creating an experiment where the human control system cannot be continuous (Loram et al. 2011). First, we study the classic postural task – sustained control of an external inverted pendulum-like load. Our innovation was to use gentle taps of a joystick, since this approach is explicitly serial ballistic. Continuous knowledge of load position had no effect on the control signal (joystick) apart from when the hand was intermittently in contact. Using standard methods models, we compared this tapping form of serial ballistic control with normal control using continuous contact of the joystick and we asked whether normal control is very different or is a ‘masquerading’ form of intermittent control. Second, we examined the circumstances appropriate for serial ballistic control in both its tapping and smooth forms. Do these conditions apply physiologically?
Using visual manual tracking of an unstable load, we showed that control using gentle, intermittent taps is entirely natural and effective (Fig. 2). The gentle tapping method resulted in slightly superior position control and velocity minimisation. Clearly, for this classic postural task control by continuous feedback is unnecessary, irrespective of whether continuous contact is continuously closed loop or smooth serial ballistic. When optimising position or velocity regulation, a modal contact rate of 2 s–1 was observed.
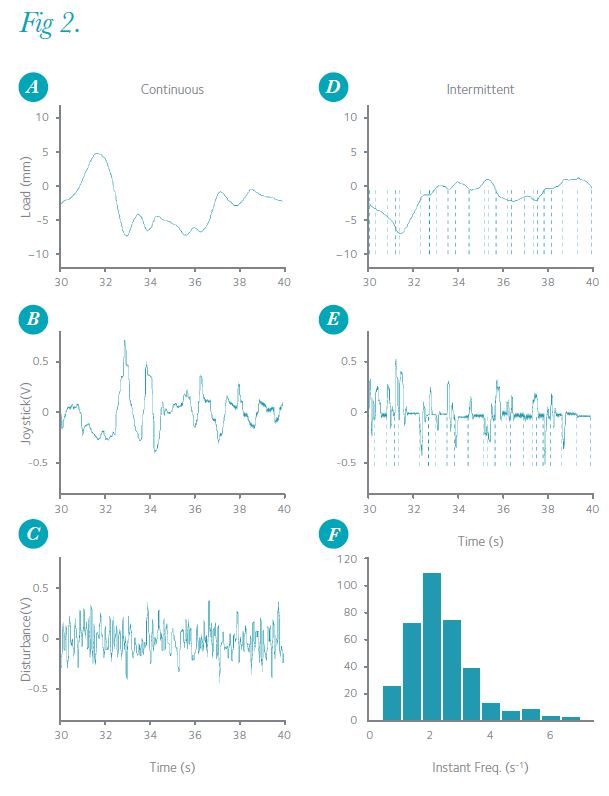
This modal rate is nicely consistent with the ideas of Craik. It exemplifies a process of serial ballistic trajectories in which it is postulated that trajectory planning limits successive actions to an optimum rate of 2 s–1 when they would ideally be more frequent to improve performance (Loram et al. 2011).
Furthermore, control using tapping contact was substantially more robust to unpredicted changes in the actuator (Fig. 3 and Loram et al. 2011). It seems that in human control intermittency is an advantage and this advantage indicates the underlying theoretical rationale.
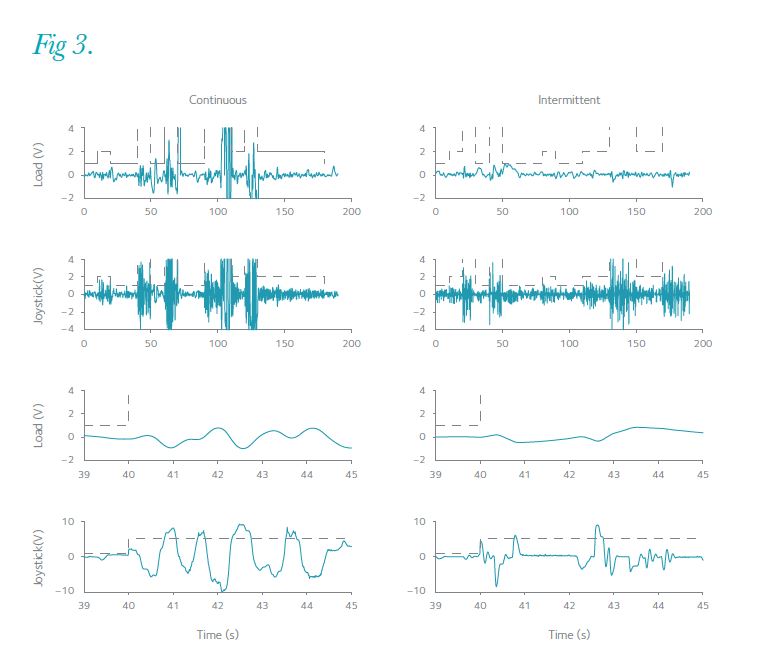
By design, serial ballistic control in general (intermittent predictive control) is an appropriate solution for bandwidth-limited systems such as those with long time delays (Gawthrop et al. 2011). Examples include controlling roving Martian explorers remotely, controlling a super-tanker with massive time lags, and controlling mechanically fast systems such as robots if control requires a time-consuming online computation. It makes sense to use a trial-and-error form of control – for the result of an action to be observed before updating the plan if the prediction was inadequate. Furthermore, because the system is usually ‘open loop’, the controlled system is easier to understand: one can discriminate changes in the system from effects caused by one’s own actions (Fig. 3). This may explain why serial ballistic control using tapping is more robust in this experiment.
Our results do not prove that normal control is intermittent. However, normal sustained control shows all the hallmarks of intermittent control (coherence limited to low frequencies, significant, variable time delays) and contains all the reasons for which intermittent control is appropriate – significant time delays, substantial computation, low bandwidth, a need for prediction, inconsistent actuators and sensors. Logically, the default assumption should be that control is intermittent. Disproof would require experimental evidence that control is genuinely continuous (Loram et al. 2011).
Returning more generally to homeostasis, why assume that gene expression, immune response, hormone release and motor plans are updated continuously? When delays are significant and system conditions are unpredictable, the serial ballistic solution is in principle more robust, economical and effective. These seem like advantages likely to have been preserved by evolution.
References
Craik KJW (1947). Theory of the human operator in control systems. I. The operator as an engineering system. Br J Psychol xxxviii, 56.
Gawthrop P, Loram I, Lakie M & Gollee H (2011). Intermittent control: a computational theory of human control. Biol Cybern 104, 31–51.
Hanneton S, Berthoz A, Droulez J & Slotine JJE (1997). Does the brain use sliding variables for the control of movements? Biol Cybern 77, 381–393.
Loram I, Gollee H, Lakie M & Gawthrop P (2011). Human control of an inverted pendulum: Is continuous control necessary? Is intermittent control effective? Is intermittent control physiological? J Physiol 589, 307–324. http://jp.physoc.org/content/589/2/307.long
Navas F & Stark L (1968). Sampling or intermittency in hand control system dynamics. J Biophysics 8, 252–302.